Research Profiles
Selected Manuscripts
- E. Guo, , R. Sanguinetti, L. Boone, J. Deng, H. Shakil, M. Gupta, "Artificial intelligence and chordoma: A scoping review of the current landscape and future directions," Brain and Spine, May 3, 2025, 5:104271, doi: 10.1016/j.bas.2025.104271.
- E. Guo, M.B. Keough, A.M. Henderson, E. Hagen, M.A. Levine, T.G. Arnason, K. Au, "Perioperative Management of Patients with Glioblastoma Co-Presenting with Pheochromocytoma," Journal of Neurosurgery: Case Lessons, Nov. 18, 2024, 8(21):CASE24374, doi: 10.3171/CASE24374.
- E. Guo, R. Ramchandani, Y. Park, M. Gupta, "OSCEai: Personalized Interactive Learning for Undergraduate Medical Education," Canadian Medical Education Journal, Aug 6, 2024, doi: 10.36834/cmej.79220.
- E. Guo, C. Perlette, M. Sharifi, L. Grasse, M. Tata, V. K. Mushahwar, M. Tavakoli, "Speech-Based Human-Exoskeleton Interaction for Lower Limb Motion Planning," IEEE International Conference on Human-Machine Systems, May 2024, Toronto, ON, Canada, pp. 1-6, doi: 10.1109/ICHMS59971.2024.10555587.
- E. Guo, M. Gupta, H. Rossong, L. Boone, B. Manoranjan, S. Ahmed, I. Stukalin, S. Lama, G. Sutherland, "Healthcare Spending vs Mortality in CNS Cancer: Has Anything Changed?," Neuro-Oncology Practice, Apr. 2024, 11(5):566-574, doi: 10.1093/nop/npae039.
- Y. Park, A. Pillai, J. Deng, E. Guo, M. Gupta, M. Paget, C. Naugler, "Assessing the research landscape and utility of large language models in the clinical setting: A scoping review," BMC Medical Informatics and Decision Making, Mar. 2024, 24:72, doi: 10.1186/s12911-024-02459-6.
- E. Guo, M. Gupta, J. Deng, Y. Park, M. Paget, C. Naugler, "Automated Paper Screening for Clinical Reviews Using Large Language Models: Data Analysis Study," Journal of Medical Internet Research, Jan. 2024, 26:e48996, doi: 10.2196/48996.
- E. Guo, M. Gupta, S. Sinha, K. Rössler, M. Tatagiba, R. Akagami, O. Al-Mefty, T. Sugiyama, P.E. Stieg, G.E. Pickett, M. de Lotbiniere-Bassett, R. Singh, S. Lama, G. Sutherland, "neuroGPT-X: Towards a Clinic-Ready Large Language Model," Journal of Neurosurgery, Oct. 2023, 140(4):1041-1053, doi: 10.3171/2023.7.JNS23573.
- A. Baghdadi, E. Guo, R. Singh, S. Lama, G. Sutherland, "Force Profile as Surgeon-Specific Signature," Annals of Surgery Open, Sep. 2023, 4(3):e326 doi: 10.1097/AS9.0000000000000326.
- J. K. Mehr, E. Guo, M. Akbari, V. K. Mushahwar, M. Tavakoli, "Deep Reinforcement Learning Based Personalized Locomotion Planning for Lower-Limb Exoskeletons," 2023 IEEE International Conference on Robotics and Automation (ICRA), London, United Kingdom, 2023, pp. 5127-5133, doi: 10.1109/ICRA48891.2023.10161559.
Invited Talks
- E. Guo, C. McGregor, A. Pratt, C. Shukalek, "Healthcare 3.0: New Professions and Empowered Patients," Canadian Medical Association Health Summit 2025, Ottawa, ON, Canada, Mar. 27-28, 2025.
- E. Guo, "OSCEai: Generative AI for Interactive Medical Education," Alberta Innovates Student Innovator Session, AB, Canada, Jul. 11, 2024.
- Alishya Burrell, Erika Dempsey, E. Guo, "Education Session: The Role of Artificial Intelligence in Geriatric Medicine Education," 43rd Annual Scientific Meeting (ASM) of the Canadian Geriatrics Society, Calgary, AB, Canada, Apr. 26, 2024.
- E. Guo, "IEEE Humangineering Series: Changing the Medical Landscape with LLMs," IEEE Sight, Schulich School of Engineering, University of Calgary, Jan. 11, 2024, available: https://www.beautiful.ai/player/-Nnu39LC0KXOwUhbIZ0E.
Research Projects
Intelligent control of a lower-limb exoskeleton
Telerobotics and Biorobotics Systems Group 2021-2023
Funded by the NSERC Undergraduate Student Research Award in the Electrical and Computer Engineering Department at the University of Alberta
The proposed project involves motion planning of an exoskeleton through a bio-inspired strategy called the central pattern generator (CPG). The adaptive CPG method, which was developed in our group, includes parameters that allow for the modulation of locomotion, such as the adjustment of gait speed, which provides additional control and flexibility for the wearer. This capability makes this method a suitable approach for flexible motion planning of lower-limb exoskeletons.
This project proposes an intelligent agent for adaptive CPG-based gait planning. In particular, we will implement the TD3 reinforcement learning algorithm to optimize CPG parameters to personalize locomotion frequency and amplitude for exoskeleton users. This intelligent scheme will allow patients with weak lower-limb muscles to use the exoskeleton for rehabilitation purposes.
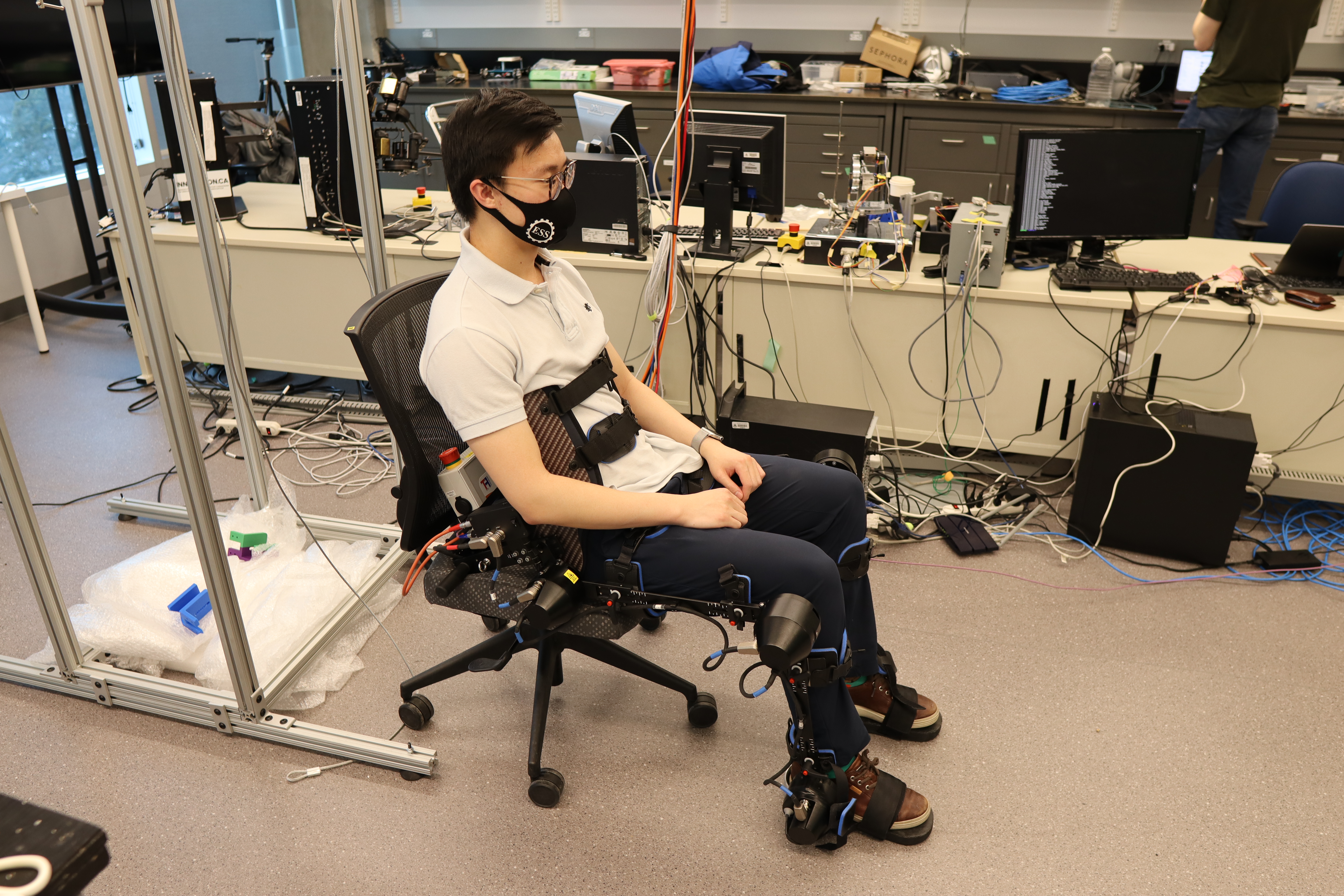
Speech-based locomotion planning for lower-limb exoskeletons
Telerobotics and Biorobotics Systems Group 2021-2022
Funded by the Dean's Research Award in the Faculty of Engineering at the University of Alberta
This paper presents a speech-based locomotion planning strategy for lower-limb exoskeletons to facilitate safe and compliant human-robot interaction (HRI). Using a new combination of social and physical HRIs, a lower-limb exoskeleton is designed to assist individuals with neurological impairments. The proposed speech-based trajectory shaping scheme integrates three components: a (i) speech processing system, (ii) finite state machine (FSM), and (iii) central pattern generator (CPG). Using the Vosk speech perception system and a probabilistic intent parser to detect voice commands, user intents are passed into an FSM, which interfaces between a voice control system and CPG to ensure smooth transitions between locomotion states (e.g., standing to walking). Next, the CPG synchronizes the joint motion of the hip, knee, and ankle of the exoskeleton through a new, modified Kuramoto model for coupled oscillators; a novel set of speech-based CPG dynamics is developed to synchronize time-continuous transitions between locomotion states. Finally, the desired locomotion trajectory is generated via a Fourier series subject to safety constraints and fed to position controllers. Experimental studies are performed with two able-bodied participants to evaluate the effectiveness of this three-part control strategy. The time needed to stand, walk approximately 12 m, and sit using voice commands was 62±2 s (n=21) and that using a button-based mobile app was 113±5 s (n=10), suggesting that voice commands are more effective than a button-based interface for locomotion planning (P ≈ 0). In contrast to a button-based control interface, speech-based control permits users to have both hands free, improving the safety and ergonomics of an exoskeleton.
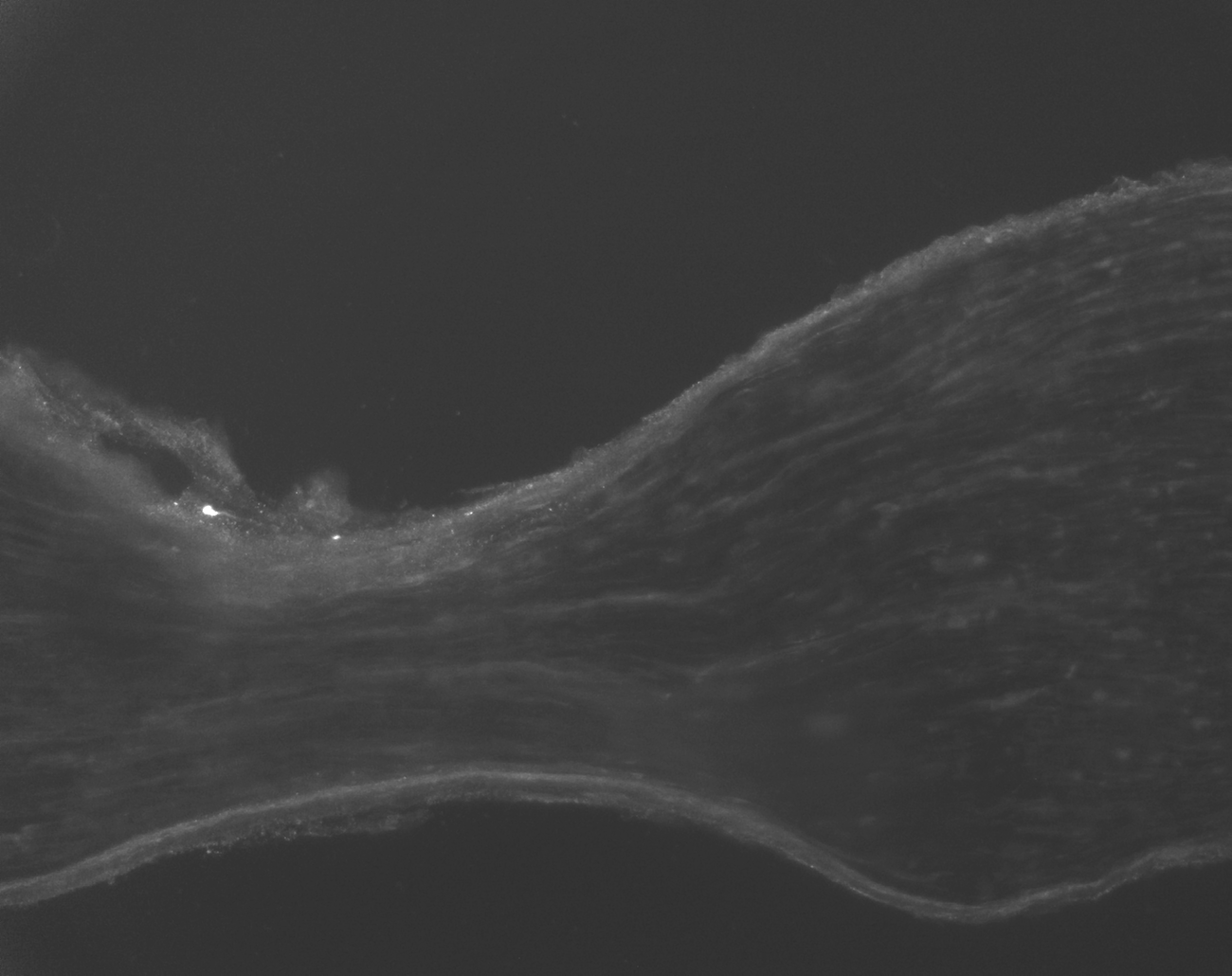
Skin and nerves: understanding the dialogue between axons and skin cells to restore sensation
Zochodne Lab Summer 2020
Funded by the Alberta Innovates Summer Studentship Award in the Faculty of Medicine at the University of Alberta
Individuals with cutaneous nerve injuries often do not have full recovery of sensation due to deficits in sensory axon regeneration. This project aims to elucidate the effects of acute and chronic cutaneous denervation (defined here as a loss of axons) on differential mRNA expression in skin keratinocytes. Here, we hypothesize that denervation alters skin keratinocyte gene expression to favour reinnervation via the upregulation of transcriptional factors such as SOX2, which is linked to the induction of fibroblasts into neural stem cells. Male CD-1 mice with unilateral sciatic and saphenous nerve crushes (acute – 7 days) or resections (chronic – one month), immunohistochemistry, and RNA sequencing will be used to assess the effects of axon damage on the behaviour of skin keratinocytes and expression of regeneration-related molecules. If the hypothesis holds, this project will provide evidence that nerve regrowth can be manipulated to restore sensation, opening avenues for pharmacological investigation.
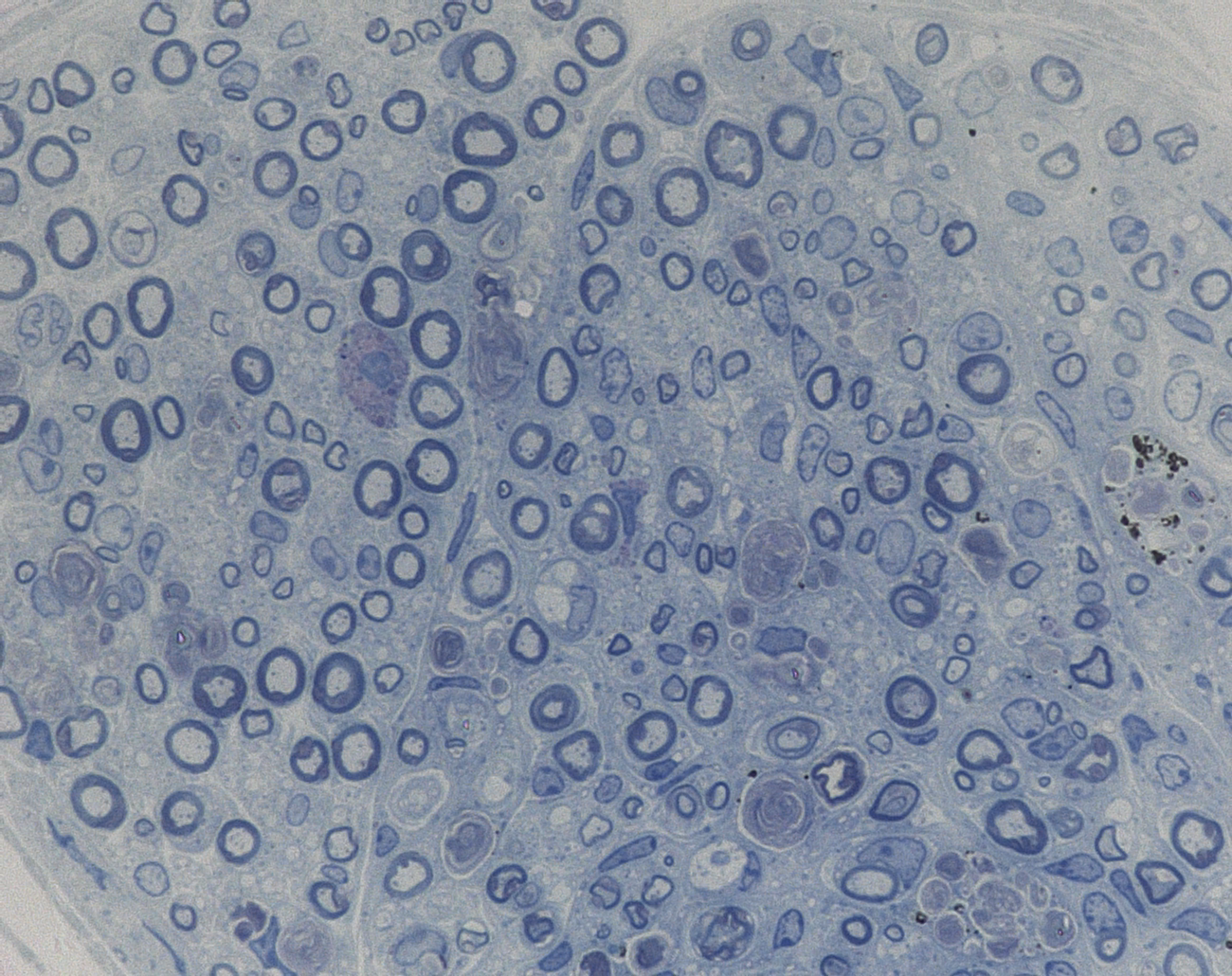
Axon regrowth and plasticity in diabetic neuropathy: the role of growth cone molecules
Zochodne Lab Summer 2019
Funded by the Office of the Provost and VP (Academic) Summer Studentship Award in the Faculty of Medicine at the University of Alberta
Diabetic polyneuropathy (DPN) is a presently irreversible disorder which causes nerve damage in people affected by type 1 and 2 diabetes mellitus (DM). The objective is to show that DPN is a reversible condition caused by the loss of peripheral nerves due to their failure to regenerate. This failure is attributed to the expression of certain molecules in diabetic peripheral nerve cells. Two molecules of interest are RhoA, an inhibitor of growth, and Rac1, a promoter of growth. In DPN, it is expected that the expression of RhoA will increase while Rac1 will decrease. The effects of these molecules will be elucidated using type 1 and 2 DM mice by histological measures, electrophysiological tests, and visual assessment. Through experimental analysis of affected mice, the characteristics of RhoA and Rac1 will provide insight into ameliorating a complex neurological disorder.